Araştırmacılar, insan saçı kalınlığındaki damarlara müdahale edilmesini gerektiren, son derece hassas retinal ven kanülasyonu ameliyatlarını otonom olarak gerçekleştirebilen robotik sistem geliştirdi.
Retinal ven tıkanıklığı (RVT), gözün arkasındaki ışığa duyarlı katmandaki (retina) bir damarın tıkanmasıyla ortaya çıkan ve görme kaybına yol açan ciddi bir hastalık. Mevcut tedavi yöntemleri arasında anormal kan damarı büyümesini engelleyen ilaçların verilmesi ya da şişliği, iltihabı azaltan düzenli steroid enjeksiyonu (ilacın doğrudan kasa, ekleme, damar içine verilmesi) bulunuyor.
Bir diğer yöntem, retinal ven kanülasyonu. Tedavi yönteminde cerrahlar tarafından tıkalı damara yüksek hassasiyetle küçük bir iğne yerleştirilir. Çok hassas bir cerrahi müdahale olan yöntemde iğne, pıhtı çözücü veya kan damarlarının anormal büyümesini kontrol eden ilaçlar içerir.
Kanülasyonda hedeflenen retinal damarların kalınlığı bir insan saçı kadar ince olduğundan, damarlara yüksek hassasiyetle elle iğne yerleştirmek oldukça riskli ve zor. Johns Hopkins Üniversitesinden araştırmacılar, cerrahlara RVT operasyonlarında yardımcı olabilecek bir robot sistemi geliştirdi.
Sistem, Science Robotics dergisinde yayınlanan makalede tanıtıldı. Robotik sistemin, cerrahi mikroskop tarafından toplanan görüntülerin yanı sıra optik koherens tomografi (OCT) adlı görüntüleme yöntemi kullanılarak toplanan göz dokusu kesit taramalarını analiz eden derin öğrenme algoritmalarıyla yönlendirildiği açıklandı.
Medical Xpress’in aktardığına göre, makalenin baş yazarı Peiyao Zhang, “Retinal ven kanülasyonu, normal insan fizyolojik sınırlarını aşan 100 mikrondan daha az bir hassasiyet gerektiriyor. Makalenin temel amacı, robotik yardımı derin öğrenme ile birleştirerek, manuel olarak elde edilmesi zor olan bir hassasiyet ve tekrarlanabilirlik düzeyine sahip otonom bir cerrahi iş akışı elde etmenin mümkün olduğunu göstermekti.” dedi.
Otonom retinal ven kanülasyonu için yeni yaklaşım
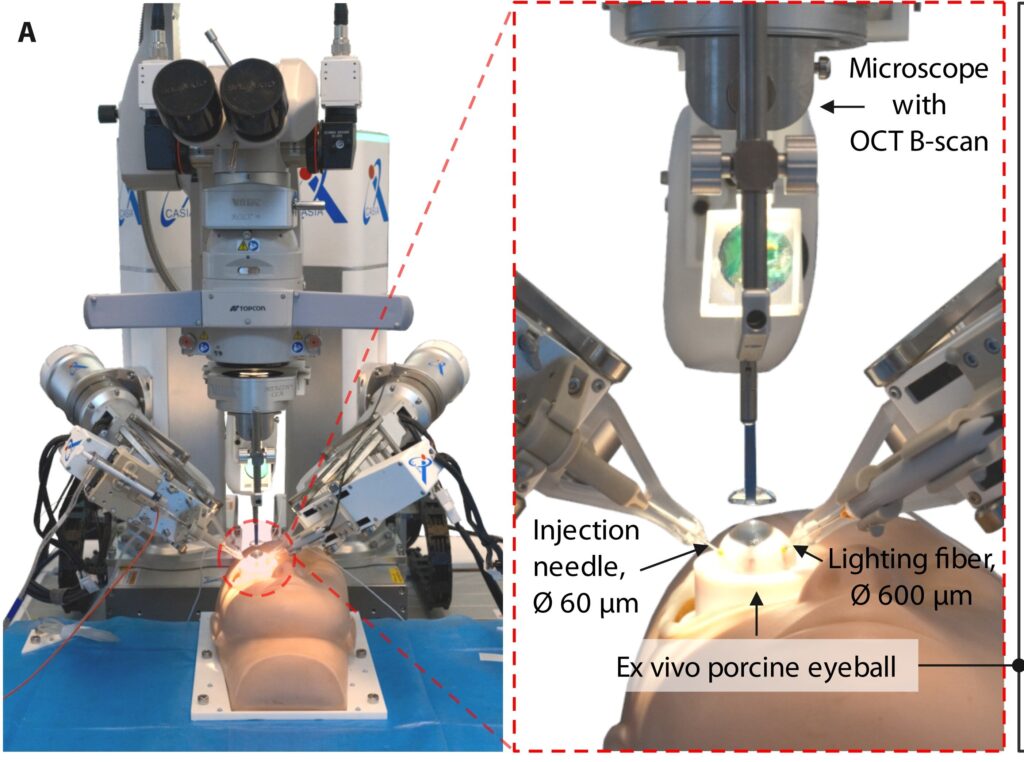
Zhang ve meslektaşlarının oluşturduğu robotik sistem, robotları kontrol etmek için hesaplamalı teknikleri yüksek çözünürlüklü görüntüleme ve derin öğrenme algoritmalarıyla birleştiriyor. Sistem, “steady-hand eye robot” (sabit-elli göz robotu) adı verilen ve küçük bir iğne ile bir cerrahi alet tutan iki robottan oluşuyor.
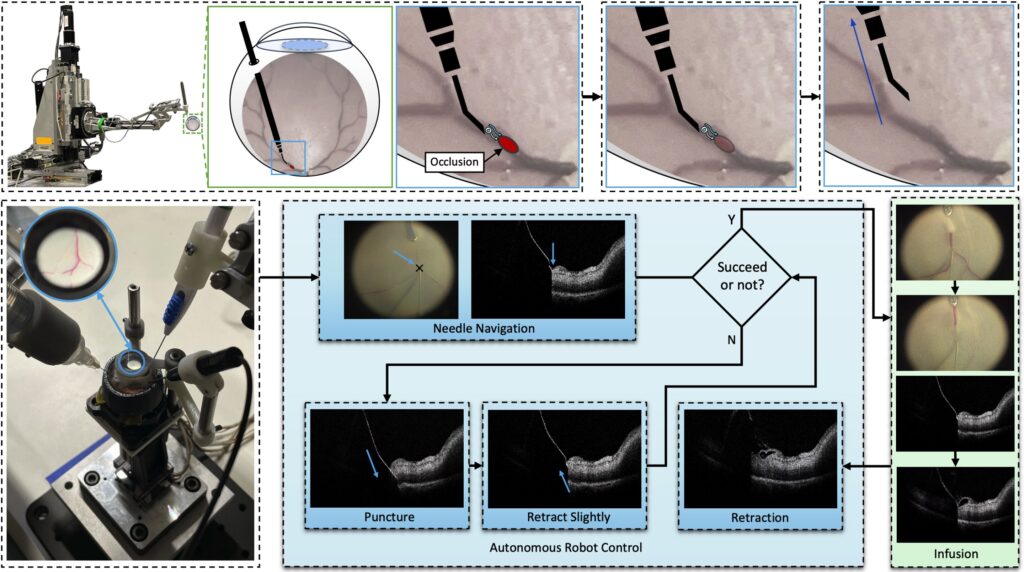
Söz konusu donanım, iğnenin hareketini takip etmek ve iğnenin etkilenen retinal damarlara doğru şekilde yerleştirilmesini sağlamak için robotun eylemlerini planlamak üzere eğitilmiş üç derin öğrenme algoritması ile birleştirilmiş.
Araştırmacılar sistemi, insanlarda nefes alıp vermeyle ortaya çıkan hareketleri taklit edecek şekilde periyodik olarak hareket ettirilen veya sabit duran domuz gözleri üzerinde test etti.
Deneylerde, robotik sistemin sabit domuz gözlerinin yüzde 90’ında ve hareketli gözlerin yüzde 83’ünde ameliyatı başarıyla tamamladığı görüldü. Özellikle, iğnenin bir retinal damara dokunduğu ve girdiği güvenilir şekilde tespit edildi.
Bulgular, robotik sistemlerin RVT ameliyatlarını etkili bir şekilde gerçekleştirebileceğini düşündürüyor. Ancak sistemin klinik ortamlarda kullanıma sunulmadan önce, canlı hayvanların dahil olduğu deneylerde ve insan klinik denemelerinde daha fazla değerlendirilmesi gerekecek.
Kaynak: Science Robotics